Best Practices für Laserscanner

Überblick
Die sorgfältige Planung und das Verständnis der Prinzipien des Scans sind wichtig, um akkurate und professionelle Scans auf effiziente und kosteneffiziente Weise zu erfassen. Diese Richtlinien helfen Ihnen bei der Bewältigung von häufig auftretenden Problemen, die bei Scanprojekten auftreten.
Standortskizze
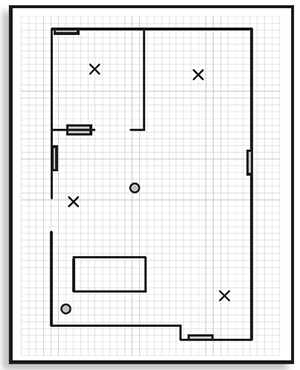
Eine kurze Skizze der Scanstelle kann helfen, Zeit zu sparen und die optimalen Scanorte zu bestimmen. Sie hilft außerdem dabei, zusätzliche physische Einschränkungen zu identifizieren, die sich auf ein Scanprojekt auswirken könnten, wie z. B. Hindernisse, Strombedarf und zusätzliche Ausrüstungsanforderungen. Wenn es sich bei der Projektstätte um eine bestehende Außenstruktur handelt, ist das Drucken eines Google Earth- oder anderen Satellitenbildes eine gute Möglichkeit, eine Scanstrategie zu organisieren.

Eine handgezeichnete Skizze ist auch ein effektives Werkzeug.
Dateinamenbenennung
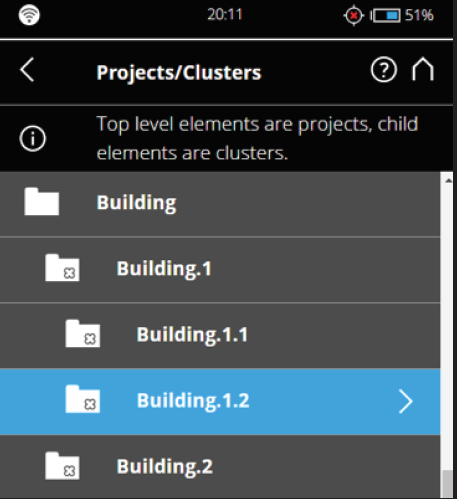
Wenn Sie ein größeres Projekt auf einem Scanner einrichten, ist es eine gute Idee, Bereiche zu identifizieren, die als Scan-Cluster gruppiert werden können, um die Registrierung einfacher zu machen. Sie können Projekt- und Unterprojektnamen in Verwalten > Projekte/Clustern festlegen.
Geben Sie jedem Scanprojekt und jedem Ordner innerhalb des Projekts, einen Namen mit Bedeutung. Beispiel: Ein Fall- oder Jobnummer, Kundenname oder -nummer oder Straßenstandorte. Ein mehrstöckiges Bauprojekt könnte folgende Dateistruktur aufweisen:
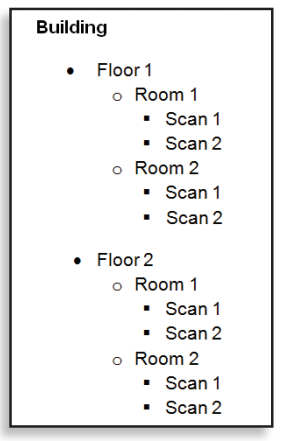
Die einfachste Art, diese Dateistruktur auf dem Scanner zu erstellen, ist es, Subprojekte hinzuzufügen und den Scanner automatisch jedes Subprojekt und jeden Scan benennen zu lassen.
Ausrüstungsüberprüfung
- Überprüfen Sie das Scanner-Stativ, um sicherzustellen, dass alle Beine sicher verriegelt sind und dass der Scanner richtig befestigt ist.
- Überprüfen Sie das Außengehäuse des Scanners auf Beschädigungen oder Verformungen.
- Prüfen Sie den Scannerspiegel auf Schmutz, Kratzer, Risse und Verformungen. Klicken Sie hier für Informationen zur Reinigung des Laserscannerspiegels.
Künstliche Ziele
Die Registrierung erfordert einzigartige Merkmale am Scanstandort, mit denen die Scans ausgerichtet werden können (Winkelschilder, Türen, Lichtmasten usw.). Standorte wie ein flacher Straßenabschnitt oder eckige Räume benötigen künstliche Ziele, um den Scan-Registrierungsprozess zu unterstützen.
Zielkugeln können an fast jeder Stelle platziert und aus jedem Winkel gescannt werden, was sie zu einer vielseitigen Lösung für Standorte ohne Oberflächen macht, an denen Papierziele angebracht werden können. FARO-Kugeln werden rigoros hergestellt und eignen sich ideal für Projekte mit strenger Genauigkeit.

Checkerboard-Ziele können leicht gedruckt, beschriftet und nach Bedarf verändert werden, aber sie müssen auch auf einer ebenen Fläche befestigt und senkrecht zum Scanner platziert werden.
Codierte Markierungen funktionieren wie Schachbretter, enthalten aber einen optischen Barcode mit einer einzigartigen Nummer. Diese einzigartigen Markierungen helfen beim Bestimmen der Scanposition und erleichtern die automatische Registrierung. Sie können nach der Installation von SCENE aus ausgedruckt werden
Zielplatzierung
Richtlinien für künstliche Zielvorgaben
- Für die Registrierung sind mindestens drei Ziele erforderlich. (Zwei, wenn Sie Sensordaten, wie z. B. den Neigungsmesser, verwenden.)
- Ordnen Sie die Ziele an, damit es eine klare Sichtlinie vom Scanner bis zum Ziel gibt.
- Stellen Sie sicher, dass jedes Ziel aus mehr als einer Scannerposition sichtbar ist.
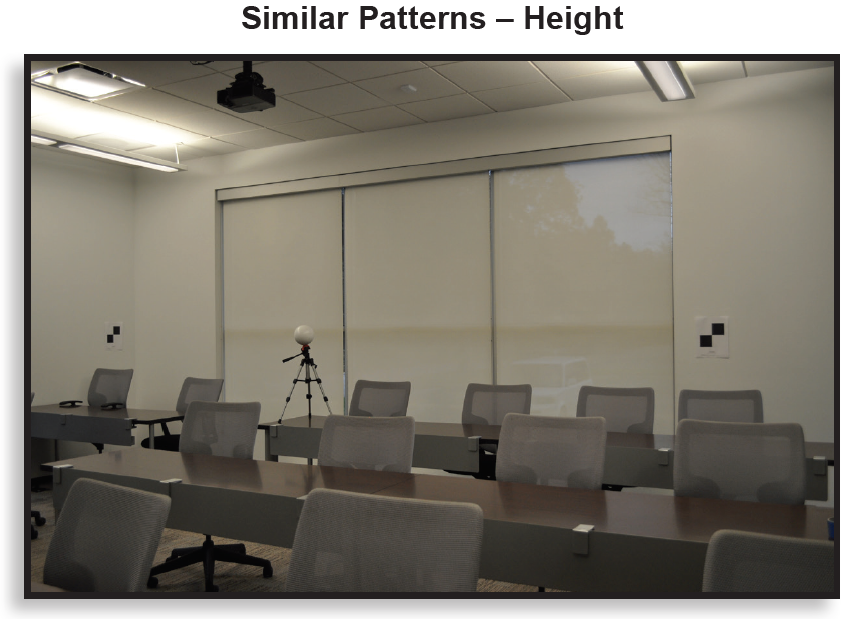
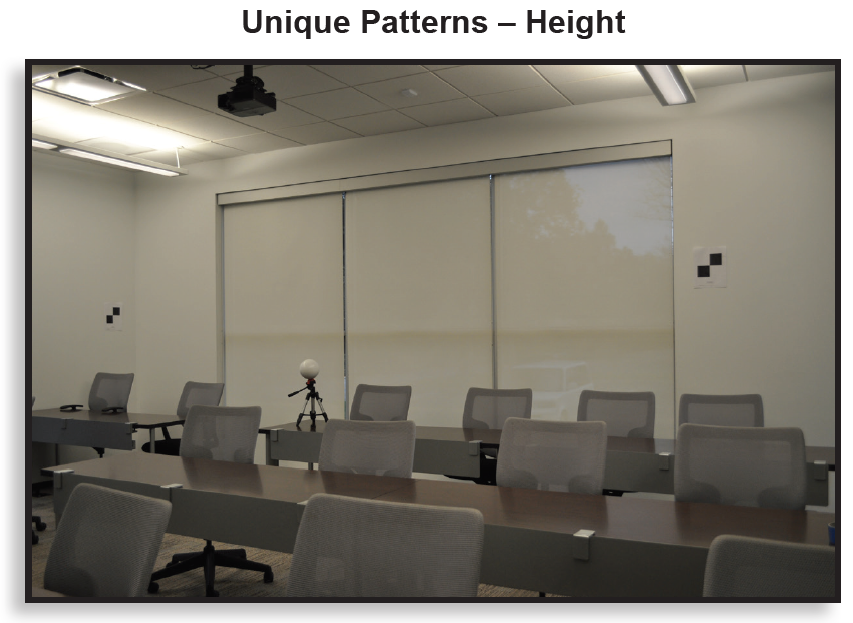
- Ordnen Sie Ziele in einzigartigen Mustern in drei Dimensionen an, indem Sie die Höhe und den Abstand der Ziele variieren.
- Verschieben Sie die Ziele während des Scanvorgangs nicht.
Siehe auch
Batterien/Verlängerungskabel
Die Energieanforderungen variieren je nach Art des Scanprojekts. Planen Sie eine angemessene Ladezeit des Akkus und die Nutzung der Steckdose, falls erforderlich. Wenn der Scanner während eines längeren Scanvorgangs an eine Steckdose angeschlossen wird, sollten Sie einen Kabelschutz verwenden, um zu verhindern, dass Schäden durch das Stolpern über Netzkabel entstehen.
Genauigkeitsprüfung
Platzieren Sie ein Element mit einer bekannten Länge wie z. B. FARO Messbalken oder Messgerät/Yard-Stick im ersten Scanbereich. Das ist eine gute Möglichkeit, die Genauigkeit der Scans nach Abschluss der Registrierung zu überprüfen. Bei Projekten mit einem höheren Genauigkeitsschwellenwert – ein FARO Messbalken hat eine zertifizierte Länge von 1500 mm und verfügt über zusätzliche Dokumentation zur Unterstützung der Scangenauigkeit.

Zusätzliche Scanner
Das Handheld FARO Freestyle erfasst Punktdaten für kleinere Objekte und Leerzeichen. Freestyle-Daten können in Focus data in SCENE registriert werden.

Anzahl der Scannerpositionen
Die Minimierung von Scannerpositionen reduziert die Scanzeit und gewährleistet, dass Punktdaten angemessen erfasst werden. Verwenden Sie eine Standortskizze, um optimale Scanorte zu identifizieren. Platzieren Sie den Scanner in Positionen, in denen sich jeder Scan mit einem anderen Scan überschneidet. Scanbereiche sollten eindeutige natürliche Ziele enthalten, um die Scans zu registrieren. Denken Sie daran, dass je nach Zielobjekt nicht jedes Mal ein vollständiger 360°-Scan erforderlich ist. Stellen Sie sicher, dass Sie Übergangsbereiche wie Türen auch scannen, um die Registrierung zu erleichtern.
Sichtlinie
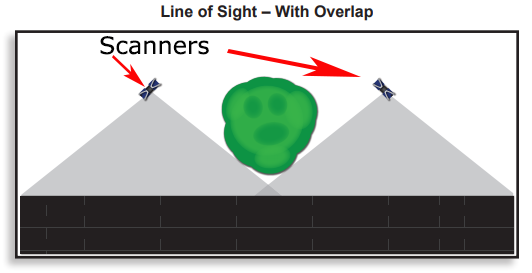
Hindernisse wie Bäume oder Spalten erfordern oft die Anpassung von Scanpositionen, um sicherzustellen, dass alle Scandaten um das Objekt erfasst werden können. Wenn Sie mit mehreren Scans oder Scannern arbeiten, stellen Sie sicher, dass die Scanbereiche über das Hindernis überlappen.
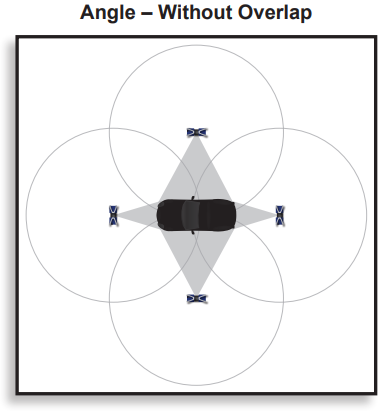
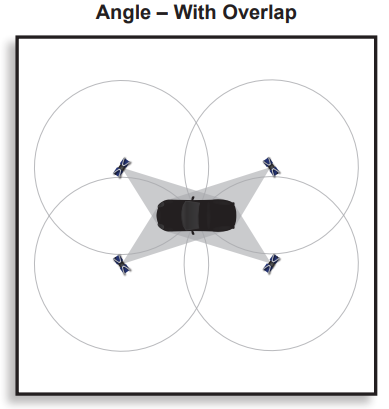
Winkel zum Zielobjekt
Mehrere Scans, die aus verschiedenen Winkeln erfasst wurden, bieten das umfassendste dreidimensionale Bild. Die Auswahl der richtigen Winkel kann die Anzahl der erforderlichen Scans reduzieren. Positionieren Sie den Scanner in Winkeln auf das Zielobjekt, das Ihnen die beste Sichtlinie für die Erfassung der erforderlichen Details gibt, und stellen Sie sicher, dass Scans überlappende Bereiche enthalten.
Halbierung
Vermeiden Sie es, den Scanner so zu positionieren, dass der Start-/Stopppunkt auf dem Zielobjekt von Interesse oder einem künstlichen Ziel liegt. Die Start-/Stopplinie oder die Naht sollten im Bereich mit dem niedrigsten Interesse liegen.
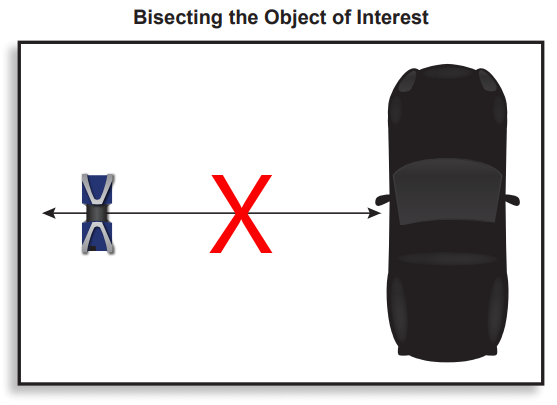
Eine einfache Faustregel ist, dass Sie bei der Verwendung des Scanner-Touchscreens, der sich an der Seite des Scanners befindet, auf das Zielobjekt gerichtet sind.
Scan-Reihenfolge ist entscheidend
Das Scannen in einer logischen Reihenfolge erleichtert die Registrierung. Die Umrundung eines Zielobjekts oder der lineare Verlauf durch eine Struktur erleichtert die Verfolgung und Registrierung von Scans. Je schwieriger es ist, der Scanreihenfolge auf einer Skizze des Projektbereichs zu folgen, desto schwieriger wird es, die Scans später zu registrieren.
Scanebene
Wenn das Zielobjekt für den Scan auf einer beweglichen Ebene ruht, wie z. B. ein Boot auf dem Wasser, ist es eine gute Idee, den Scanner auf derselben Ebene der Bewegung zu haben, um zu verhindern, dass winzige Bewegungen die Messdaten beeinflussen.
ScanPlan und Scan-Assist
Der FARO Handheld 2D-Scanner, der ScanPlan, ermöglicht Ihnen, eine Karte eines Gebäudeplans schnell zu erstellen. Mit dem Scan-Assist-Modus von ScanPlan werden die bestmöglichen Positionen für die Positionierung Ihres Focus Scanners vorgeschlagen. Weitere Informationen zur Verwendung von Scan-Assist finden Sie in diesem Artikel.
Scanauflösung
Die Scanauflösung bezieht sich auf die Anzahl der gesammelten Datenpunkte und der Abstand zwischen diesen Punkten. Wählen Sie eine Auflösung basierend auf dem erforderlichen Detaillierungsgrad, dem Abstand zum Zielobjekt und dem Abstand zu den Zielen.
Allgemeine Lösungsrichtlinien
- 1/1 oder 1/2 – Objekte und kleine Bereiche
- 1/4 oder 1/5 – Große Innen- und Außenbereiche
- 1/8 oder 1/10 – Innen- und kleine Außenbereiche
Scanqualität
Die Scanqualität bezieht sich auf die Anzahl der Messungen, die der Scanner zur Bestätigung der Punktdaten macht. Eine Erhöhung dieser Einstellung erhöht die Scangenauigkeit, erhöht aber auch die Scanzeit. Die Qualitätseinstellung verwendet auch Rauschunterdrückung, einen Algorithmus, der bestimmt, ob Scanpunktdifferenzen auf Objektdetails oder Rauschen zurückzuführen sind.
Allgemeine Qualitätsrichtlinien
- 2x – Optimale Bedingungen (gute Beleuchtung, gutes Wetter) und wenn Zeit wichtig ist
- 3x – Innen- oder Außenbereiche mit Bewölkung
- 4x – Im Freien bei sonnigen Bedingungen, wenn Reichweite erforderlich ist, oder bei schlechtem Wetter
Horizontal/Vertikal
Diese Einstellung kann den Scanbereich des Scanners einschränken und 180°-Scans oder andere Teilbereiche ermöglichen.
Hinweis: Diese Einstellung ist dauerhaft, denken Sie also daran, sie beim nächsten Scannen zurückzusetzen.
Farbe
Wenn ein Scanbereich extrem dunkel ist oder die Zeit wichtig ist, kann durch das Ausschalten der Farbe die Zeit reduziert werden.
Hinweis: Einige Oberflächen in einem Rohscan können aufgrund der nahinfraroten Beschaffenheit des Scanners und der unterschiedlichen Reflexions-/Intensitätswerte ausgewaschen erscheinen. Wenn Scans eingefärbt werden, sollten diese Details sichtbar sein.
Belichtungsmessung
- Gleichmäßig gewichtet: Ideal, wenn die Beleuchtung relativ einheitlich ist. Diese Einstellung verwendet Licht aus der gesamten Szene und braucht weniger Zeit.
- Horizontal gewichtet: Die Kamera eignet sich ideal für Szenen mit heller Deckenbeleuchtung und nutzt Licht vom Horizont.
- Zenith gewichtet: Am besten für Szenen, in denen helle Beleuchtung auf Augenhöhe oder von unten kommt, die Kamera verwendet Lichtinformationen von oben.
Vordefinierte Scanprofile
Die schnellste Möglichkeit, Projektanforderungen zu bestimmen, ist die Verwendung der vordefinierten Scanprofile auf dem Scanner.
Neuere Modelle: Focus Core, Focus Premium, Focus Premium Max
| Profil | Verwenden Sie diese, wenn | Auflösung | Qualität | Farbe | Sensoren |
|---|---|---|---|---|---|
| Beschleunigte | In Innenräumen, Abstand zwischen Scanner und zu untersuchendem Objekt unter 10 m | 1/8 | 3X | Aus | Ein |
| Standard | In Innenräumen, Abstand zwischen Scanner und zu untersuchendem Objekt über 10 m | 1/5 | 3X | Aus | Ein |
| Erweitert | Im Freien, Abstand zwischen Scanner und Objekt von Interesse ist über 20m | 1/4 | 3X | Aus | Ein |
| Objekt HD1 | Hochauflösender Scan für nähere Objekte | 1/2 | 4X | Ein | Ein |
| Flash2 | In Innenräumen, Abstand zwischen Scanner und zu untersuchendem Objekt unter 10 m | 1/43 | 2x | Ein | Aus |
Hinweis1: Das Profil Objekt HD verwendet die interne Kamera mit einer Auflösung von 8 MPx (nur die Einstellung Hohe Auflösung verwendet 13 MPx). Es verwendet auch die Einstellung "Nahbereich" für nähere Objekte.
Hinweis2: Das Flash-Profil ist nur bei Verwendung der FARO Stream App und mit einer gültigen Lizenz verfügbar. Flash verwendet das PanoCam-Zubehör mit einer Ricoh Theta Z1 und einem groben, weniger genauen Neigungsmesser.
Hinweis3: 1/4 vertikale Auflösung und 3 U/min (10 s) horizontale Auflösung
Allgemeine Informationen:
Es ist möglich, die oben erwähnten vordefinierten Profile anzupassen und zu klonen (gilt nicht für Flash) oder neue Profile zu erstellen. Bitte verwenden Sie angepasste Profile für umgebungsspezifisches Scannen. Stream-Profile werden nicht mit dem Focus Scanner synchronisiert, um Konflikte zwischen mehreren Geräten zu vermeiden.
Legacy Models: FocusS, FocusS Plus, FocusM
| Profil | Verwenden Sie diese, wenn | Auflösung | Qualität | Farbe | Sensoren |
|---|---|---|---|---|---|
| Innenbereich ...10 m | Innenbereich, Abstand zwischen Scanner und Zielobjekt ist unter 10 m | 1/8 | 3x | Ein | Ein |
| Innenbereich 10 m... | Innenbereich, Abstand zwischen Scanner und Zielobjekt ist über 10 m | 1/5 | 4X | Ein | Ein |
| Innenbereich HDR | Innenbereich, Abstand zwischen Scanner und Objekt liegt unter 20 m mit HDR-Qualität | 1/5 | 4X | Ein | Ein |
| Im Freien ...20 m | Im Freien, Abstand zwischen dem Scanner und dem Zielobjekt liegt unter 20 m | 1/5 | 4X | Ein | Ein |
| Im Freien ...20 m | Im Freien, Entfernung zwischen Scanner und Zielobjekt liegt bei über 20 m | 1/4 | 4X | Ein | Ein |
| HDR im Freien | Im Freien liegt der Abstand zwischen Scanner und Zielobjekt bei über 20 m mit HDR-Qualität | 1/4 | 4X | Ein | Ein |
| Vorschau | Schneller Scan mit niedriger Auflösung | 1/16 | 4X | Aus | Aus |
| Objekt HD | Hochauflösender Scan | 1/2 | 6x | Ein | Ein |
| Im Freien: Großer Abstand | Der Abstand zwischen dem Scanner und dem Zielobjekt liegt über 20 m und die Messgenauigkeit der Objekte, die näher an den Scanner liegen, ist nicht wichtig. | 1/4 | 4X | Ein | Ein |
Vordefinierte Scanprofile können nach Bedarf geändert werden, und benutzerdefinierte Scanprofile können für individuelle Bedürfnisse hinzugefügt werden.
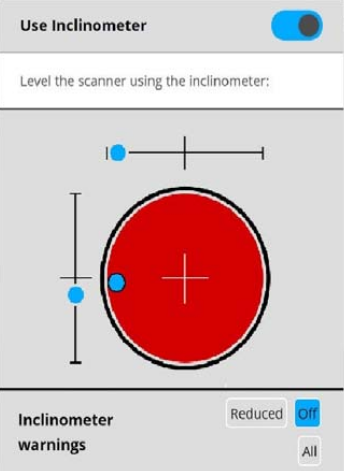
Neigungsmesser
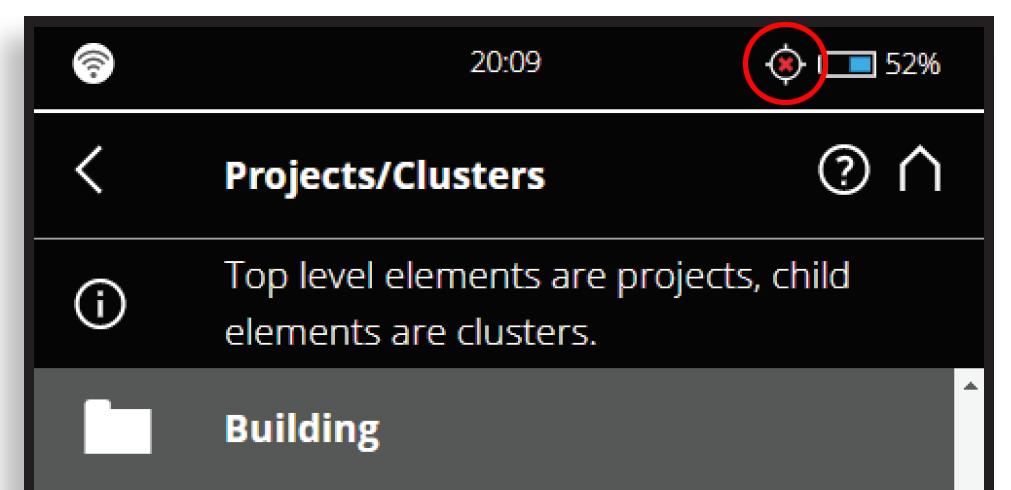
Versuchen Sie, den Scanner so zu positionieren, dass die Neigung zwischen +/-5° liegt. Ein Neigungswarnsymbol in der Statusleiste  ist nur sichtbar, wenn die aktuelle Neigung des Scanners über 2° liegt (das Symbol leuchtet gelb). Das Symbol leuchtet rot, wenn der Scanner mehr als 5° geneigt ist.
ist nur sichtbar, wenn die aktuelle Neigung des Scanners über 2° liegt (das Symbol leuchtet gelb). Das Symbol leuchtet rot, wenn der Scanner mehr als 5° geneigt ist.
Sie können Ihren Neigungsmesser durch Auswahl von Start > Parameter > Sensoren auswählen. Die Ansicht zeigt eine Wasserwaage mit Bulls Eye Neigungsmesser, wie sie bei der Montage auf dem Scanner erscheinen würde.
Sie können die automatische Verwendung der Neigungsmessung durch den Neigungsmesser für die Scanregistrierung in SCENE aktivieren oder deaktivieren. Unabhängig von Ihrer Einstellung werden die Daten dieses Sensors jedoch immer gemessen und an jedem Scan angebracht. Wenn die Verwendung der Neigungsmessdaten eingeschaltet ist, werden sie automatisch zur Registrierung der Scans in SCENE verwendet; wenn sie ausgeschaltet sind, werden die Daten ignoriert.
Der Neigungsmesser sollte ausgeschaltet werden, wenn Sie über Kopf scannen.
Hinweis: Wenn Sie im Freien oder in einem Bereich mit instabilen Oberflächen scannen, prüfen Sie die Neigungsmesserblase, bevor Sie zum nächsten Scan wechseln. Wählen Sie Verwalten > Sensoren > Neigungsmesser. Wenn sich der Neigungsmesser in der roten Zone befindet, dann nivellieren Sie den Scanner wieder, prüfen Sie, ob die Stativbeine stabil sind und scannen Sie dann erneut.
Schlechtes Wetter
- Regen – Verringern Sie die Auflösung, um die Anzahl der gescannten Tröpfchen zu reduzieren und die Qualität zu erhöhen, um die Messdaten zu bestätigen.
- Nebel – Auflösung auf 1/4 oder 1/3 erhöhen und 3x, 4x Qualität verwenden.
- Starke Winde – Untere Dreibeinhöhe und verwenden Sie 8 bis 10 Pfund Sandbeutel, um das Stativ zu stabilisieren. Vorsicht: Lassen Sie den Scanner nicht unbeaufsichtigt im starkem Wind.
- Hitze – Bei starker direkter Sonneneinstrahlung oder Temperaturen über 40 °C (104 °F), kann eine Hitzeschutzabdeckung den Scanner schützen und die Betriebszeit verlängern.
Störende Oberflächen
- Hell – Helle Oberflächen können zu einer Zunahme des Scanrauschens und zum Verlust von Messdaten führen. Die Erhöhung der Scanqualität hilft dabei, die Auswirkungen dieser Oberflächen zu reduzieren. In noch extremeren Situationen versuchen Sie, die Oberfläche mit Abdeckband oder Klebeband abzudecken.
- Reflektierend– Spiegel und andere stark reflektierende Oberflächen können eine Scanherausforderung darstellen. Die Abdeckung dieser Oberflächen mit braunem Papier oder Klebeband kann ihre Auswirkungen minimieren.
- Glas – Messungen durch Glasoberflächen führen nicht zu wiederholbaren oder genauen Ergebnissen. Sofern die Glasoberfläche nicht über sehr spezielle Beschichtungen verfügt, können Rückreflexionen auftreten und die radialen Messungen beeinträchtigen. Selbst wenn die Glasoberfläche über geeignete Beschichtungen verfügt, um dies zu verhindern oder zu minimieren, hat das Glas einen anderen Brechungsindex als die Luft, durch die sich der Strahl bewegt. Diese Änderung des Brechungsindexes kann zu einem Fehler bei der radialen Entfernungsmessung führen und hat außerdem zur Folge, dass der Strahl "gekrümmt" wird oder sich nicht mehr auf einem geraden Weg vom Tracker zum Ziel befindet. Diese Krümmung des Strahls wirkt sich auf die Messungen des Scanners aus. Die Art der Biegung ändert sich auch, wenn sich der Winkel, in dem der Strahl in das Glasfenster eintritt, ändert, was zu einem Verlust an Genauigkeit und Wiederholbarkeit führt.
- Wasser– Wasser bricht das Licht zu stark, um ein zuverlässiges Scanergebnis zurückzugeben und sollte vermieden werden.
- Extrem heiße Oberflächen - FARO-Scanner arbeiten mit Infrarotlicht. Über die Temperatur des Ziels hinaus ist die Leuchtdichte oder die Emissionsmenge im Infrarotspektrum am wichtigsten. Alle Gegenstände emittieren IR, und die Menge an IR, die sie emittieren, nimmt mit steigender Temperatur zu. Extrem heiße Gegenstände (über mehrere hundert Grad Celsius) emittieren tendenziell mehr IR als sie reflektieren. Bei diesen extremen Temperaturen ist es unwahrscheinlich, dass die gesamte vom Scanner abgegebene Laserleistung reflektiert und zurückkehrt. Dieser Zustand kann zu fehlenden und ungenauen Scandaten führen. Generell empfehlen wir, keine Objekte zu scannen, die heißer als 500 °C sind, da die Ergebnisse nicht vorhersehbar sind.
Registrierung vor Ort
Ältere Modelle: FocusS, FocusS Plus, FocusM
Die Vor-Ort-Registrierung ermöglicht es, die Scandaten, sei es von einem einzelnen Scan oder mehreren gleichzeitig laufenden Scans, drahtlos direkt an einen PC vor Ort zu übertragen und automatisch abzugleichen. .
Neue Modelle: Focus Core, Focus Premium, Focus Premium Max
Für die Registrierung vor Ort wird die Verwendung der FARO Stream App (erhältlich im Google Play Store und im Apple App Store) empfohlen. Stream registriert die neu erfassten Scans automatisch. Stream verwendet eine automatische Draufsicht und eine Cloud-zu-Cloud-basierte Registrierung. Diese automatische Registrierung wird nach Abschluss jedes Scans automatisch durchgeführt. Es ist auch möglich, eine manuelle Registrierung durchzuführen und Scan-Verbindungen in Stream hinzuzufügen, die für die Feinregistrierung in SCENE als letzter Verarbeitungsschritt verwendet werden können.
Weitere Informationen finden Sie im Stream-Handbuch, Kapitel „Focus Scan Registration”.
Scanner-Sicherheit
- VORSICHT: Lassen Sie den Scanner nicht unbeaufsichtigt.
- Beschränken Sie den Datenverkehr im Scanbereich so weit wie möglich.
- Damit der Scanner besser auffällt, sollten Sie Malerklebeband entlang der Stativbeine anbringen oder in Schwimmnudeln wickeln, die auf die richtige Größe zugeschnitten sind.
- Verwenden Sie einen Kabelschutz, um das Netzkabel abzudecken, wenn es am Scanner befestigt ist.
- Beim Bewegen des Scanners auf einem Stativ, halten Sie immer eine Hand auf dem Scanner.
- Bei instabilem Untergrund (z.B. Sand, loser Schmutz oder Industriegitter) versuchen Sie, Schwingungsdämpfer zu verwenden, Stativbeine in Tennisbällen einzusetzen oder die Beine auf alte CDs oder Möbelgleiter zu stellen.
PanoCam
Das PanoCam-Zubehör beschleunigt den Scanvorgang durch die Aufnahme von kolorierten 360°-Fotos in einer Sekunde.
Für alle V8- und V9-Focus-Scanner:
| Modell | Hoher Dynamikbereich (HDR) |
|---|---|
| Focus V8-Erbe: FocusS, FocusS Plus, FocusM | Nicht verfügbar |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | Optionale Einstellung |
Allgemeine Informationen:
- Verwenden Sie die FARO PanoCam-Halterung (FARO-Artikel ACCS-0016), um die Panoramakamera am Focus Scanner zu befestigen. Gilt nur für eine Ricoh Theta Z1-Kamera. Verwenden Sie die neueste Focus- und Ricoh Theta Z1-Kamera-Firmware (siehe https://support.theta360.com).
- VORSICHT! Ziehen Sie beim Zusammenbau der Ricoh Theta Z1 und der PanoCam-Halterung die Kameraschraube nicht zu fest an. Dies könnte zu Schäden an der Kamera oder der Halterung führen. Es wird empfohlen, die Kameraschraube immer mit der gleichen Kraft und Methode anzuziehen. Weitere Informationen und Details finden Sie in der Focus-Bedienungsanleitung.
- Um optimale Scan-Kolorierungsergebnisse zu erzielen, sollten Sie einen PanoCam-Kalibrierungsscan durchführen, nachdem Sie die PanoCam-Halterung und die Ricoh Theta Z1 montiert haben. Für die Verarbeitung von PanoCam-Scans in Sphere XG ist es derzeit erforderlich, in jedem Projekt vor dem Hochladen einen Panocam-Kalibrierungsscan aufzunehmen.
- Es wird empfohlen, die Anschlusskontakte der PanoCam-Halterung und des Focus-Scanners von Zeit zu Zeit zu reinigen. Verwenden Sie dazu ein Wattestäbchen und Isopropylalkohol.
Lagerung
Für alle V8- und V9-Focus-Scanner:
| Modell | Solid State Drive (SSD) |
|---|---|
| Focus V8-Erbe: FocusS, FocusS Plus, FocusM | Nicht verfügbar, nur SD-Karte |
| Focus V9: Focus Core, Focus Premium, Focus Premium Max | Betrieb mit integrierter SSD oder SD-Karte |
Allgemeine Informationen:
Scanprojekte werden je nach den Einstellungen in der Speicherverwaltung auf der SSD oder der SD-Karte gespeichert. Auf der SSD gespeicherte Projekte können auf die SD-Karte exportiert werden. Es wird dringend empfohlen, die integrierte SSD zu verwenden. Wenn Sie die SD-Karte verwenden und die automatische SD-Kartensynchronisierung einstellen, erhöht sich die Zeit für die Scan-Erfassung. Die Einstellung kann unter Verwalten > Speicherverwaltung überprüft werden.
HINWEIS: Alle Scans in einem Projekt müssen auf demselben Speichermedium gespeichert werden. Wechseln Sie während eines Scanprojekts nicht zwischen dem internen (SSD) und dem SD-Kartenspeicher.